车辆自主和智能实验室(VAIL)专注于开发方法,提高机器人系统的自主性和情报如无人地面、空中和水上的车辆。我们的研究兴趣包括规划、学习和单个或多个机器人协调技术与潜在应用包括自主导航、环境监测、搜索和救援,以及智能交通。
最新的新闻和事件
-
我们收到了观众选择奖MassRobotics竞争

我们1 4小组授予(其他授予团队是塔夫茨大学,麻省理工学院,WPI)。这竞争呼吁世界各地的团队创建一个创新的机器人/自动化项目。观众选择奖是一个独特的奖投票和选定的所有与会者。
-
一个RSS文件接受
我们提出一个新的框架,可以同时支持导航、映射和探索在室外非结构化环境中。论文将很快上市。
-
格兰特从美国陆军研究实验室(支持)

我们将继续一个选项在越野性能时期自治与其他3团队包括麻省理工学院、华盛顿卡耐基-梅隆和U。
-
2022年排名前五的故事

我们的工作在无碰撞导航在凌乱的环境中被选为一个“2022年排名前五的故事“通过Clearpath机器人。
-
格兰特从USACE
这个项目是关于防洪系统的自动化和机械检查。我的团队将有助于大型研究团队包括德州农工大学的研究人员,大米,可能等。
-
最佳学生论文奖2022年RSS
我们得到了最佳学生论文奖在今年的机器人:科学和系统(RSS)会议。摘要“正义与发展党:细心的内核信息采集”可以在这找到链接。也看到代码和其他结果在右边面板和一个简短的视频。
-
格兰特从NAVSEA

格兰特将支持我们研究高保真射频场景生成实时处理。
-
我们的工作是,Clearpath机器人
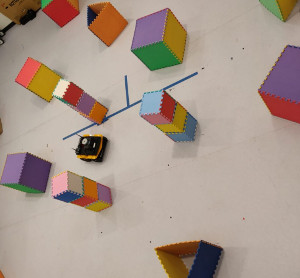
我们工作的Log-MPPI导航已经被Clearpath机器人选择和特色。看到这个链接。也看到相关纸first-authored实验室成员伊默罕默德。
-
格兰特从NAVSEA
这笔赠款将支持我们开发导航方法,允许AUV / ASV海洋非结构化环境中执行复杂的检验任务。
-
两个RSS文件接受
一篇论文提出了一种新的内核称为细心内核信息收集(arXiv),另一个是一个新的无人监督的越野自治领域适应气候变化的方法(arXiv)。
-
我们的工作是在亚马逊

我们的工作已经被选择,在亚马逊机器学习研究的成功故事奖项目。看到这个链接获取详细信息。
-
格兰特从美国陆军研究实验室(支持)
我们1 4队选中(别人是麻省理工学院,华盛顿卡耐基-梅隆和U)。这个格兰特将支持我们的团队研究无人地面车辆的越野导航和控制。
-
NSF的职业

基金将支持自治环境遥感和建模。
-
一个RSS文件接受
我们提出了一种新的机制(内核Taylor-based值函数近似)机器人的决策。论文将很快上市。
-
格兰特从NSF强劲的智能程序
NSF将支持我们的项目的空气/水车辆规划挑战时变环境。
-
格兰特从美国陆军研究实验室(支持)
研究这个格兰特将支持我们的团队提高自治系统功能控制复杂和竞争激烈的环境。我们1 8队选中。这是一个媒体链接。
-
Amazon AWS机器学习研究奖

该奖项将允许维尔研究人员访问和利用亚马逊的最先进的云计算工具和服务推动我们的工作在机器学习和自治系统。
-
两个RSS文件接受
我们使用可达性分析来描述时变马尔科夫决策过程和帕累托蒙特卡洛树搜索多目标的规划。
-
多个新博士生加入维尔!
三个博士生承认今年春天。欢迎Weizhe陈,陈郑Junhong徐!






